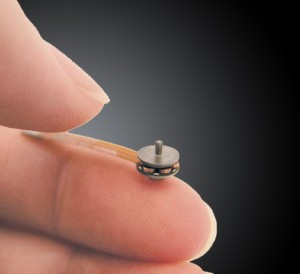
Micromotor brushless DC 10 mm. 0,2 W
Motor plano, sin escobillas de imanes permanentes de Neodimio. Un bobinado de 4 Voltios DC. Máxima velocidad 22.000 rpm. Con o sin sensores Hall. Necesita electrónica de control. El motor pesa 0,82 gr.

Motor plano, sin escobillas de imanes permanentes de Neodimio. Un bobinado de 4 Voltios DC. Máxima velocidad 22.000 rpm. Con o sin sensores Hall. Necesita electrónica de control. El motor pesa 0,82 gr.
Reductora de engranaje recto de 2 a 6 etapas. Reducción desde 6 a 900 a 1. Máximo par en continuo 0,6 Nm.
Encoder, salida de señal TTL compatible. Canales A y B. Máxima frecuencia 20 kHz.
Resolver. Entrada, primario 10 V de pico, 10 kHz. Salidas sen y cos. peso 40 gr. Error eléctrico +/- 10 minutos de arco.
Una vez programado puede funcionar autonomamente con discretas funciones de automata y sincronizarse a traves de Bus CAN, USB, RS232. Entradas y salidas configurables. Se pueden sincronizar hasta 128 unidades. Puede hacer de master de otras unidades esclavas. Interfaz de usuario para windows. Software gratis.
Se acopla al motor en la fábrica. Alimentación 24 V DC. Mientras se mantiene alimentado, permite al motor girar. En caso de emergencia o en ausencia de corriente, frena para evitar daños. Freno de seguridad 1,4 Nm No es para frenar el motor de manera dinámica, es un freno de bloqueo/desbloqueo
Reductora planetaria diàmetro 62 mm Reductora planetaria de 1 a 3 etapas. Reducción desde 5,2 a 236 a 1. Máximo par en continuo 50 Nm.
Reductora esterilizable de 22 mm. Para aplicaciones medico-quirúrgicas. Esterilizable en autoclave. Reductora planetaria de 1 a 5 etapas. Reducción desde 3,8 a 4592 a 1. Máximo par en continuo 2 Nm.
Reductora planetaria 16 mmReductora planetaria de 1 a 5 etapas. Reducción desde 4,4 a 4652 a 1. Máximo par en continuo 0,3 Nm.